
Halim Djerroud
Projects and Open Source Software
Discover my research projects, frameworks, and open source tools developed over the years.

Framework for developing and simulating multi-agent systems. gAgent provides a flexible architecture for creating autonomous agents capable of communicating, cooperating, and solving complex problems in a distributed manner.
Modern and lightweight PHP framework for web application development. PwitStart offers a clear MVC architecture, simple routing, and tools to accelerate the development of professional web projects.
Machine learning library implementing classic and modern ML algorithms. LeaRN aims to provide pedagogical and practical tools for teaching and applying machine learning.
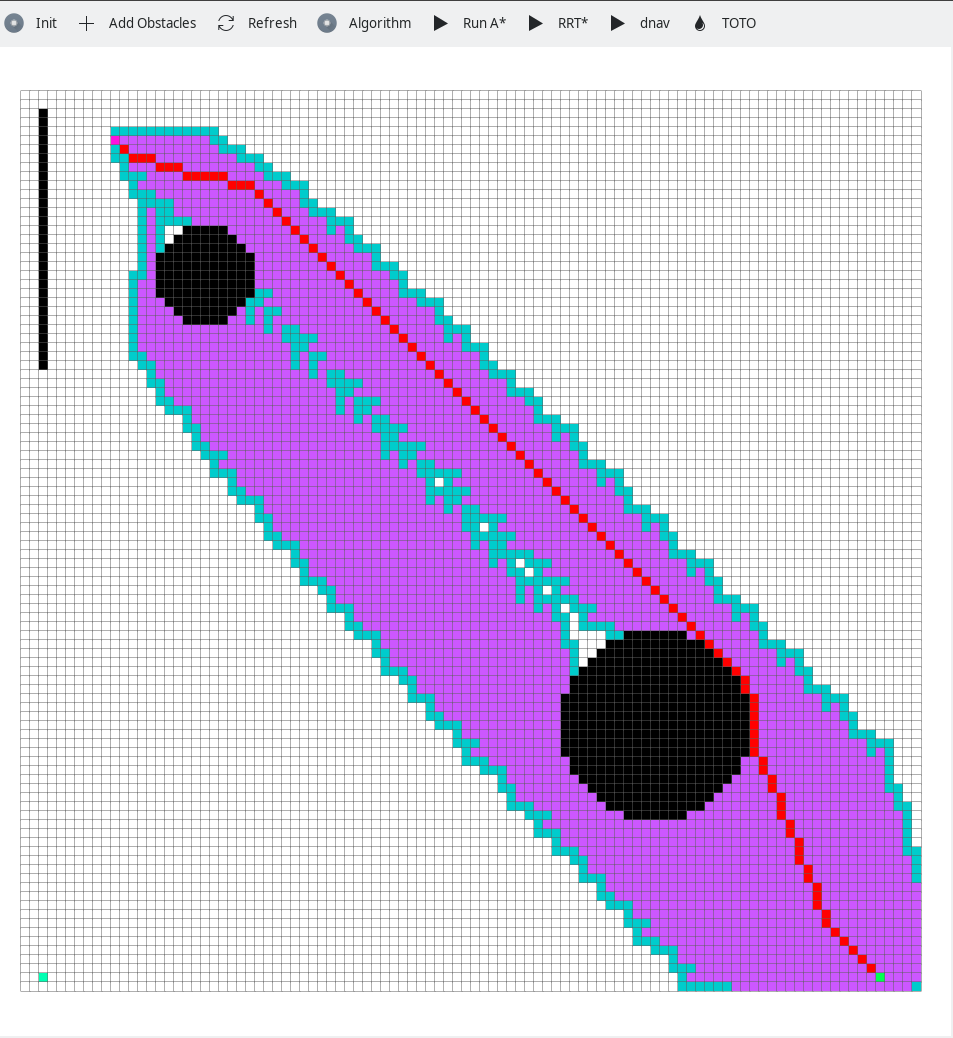
Collection of automated planning algorithms for robotics and AI. MPAL implements classic and modern planners, usable for teaching and research in planning.
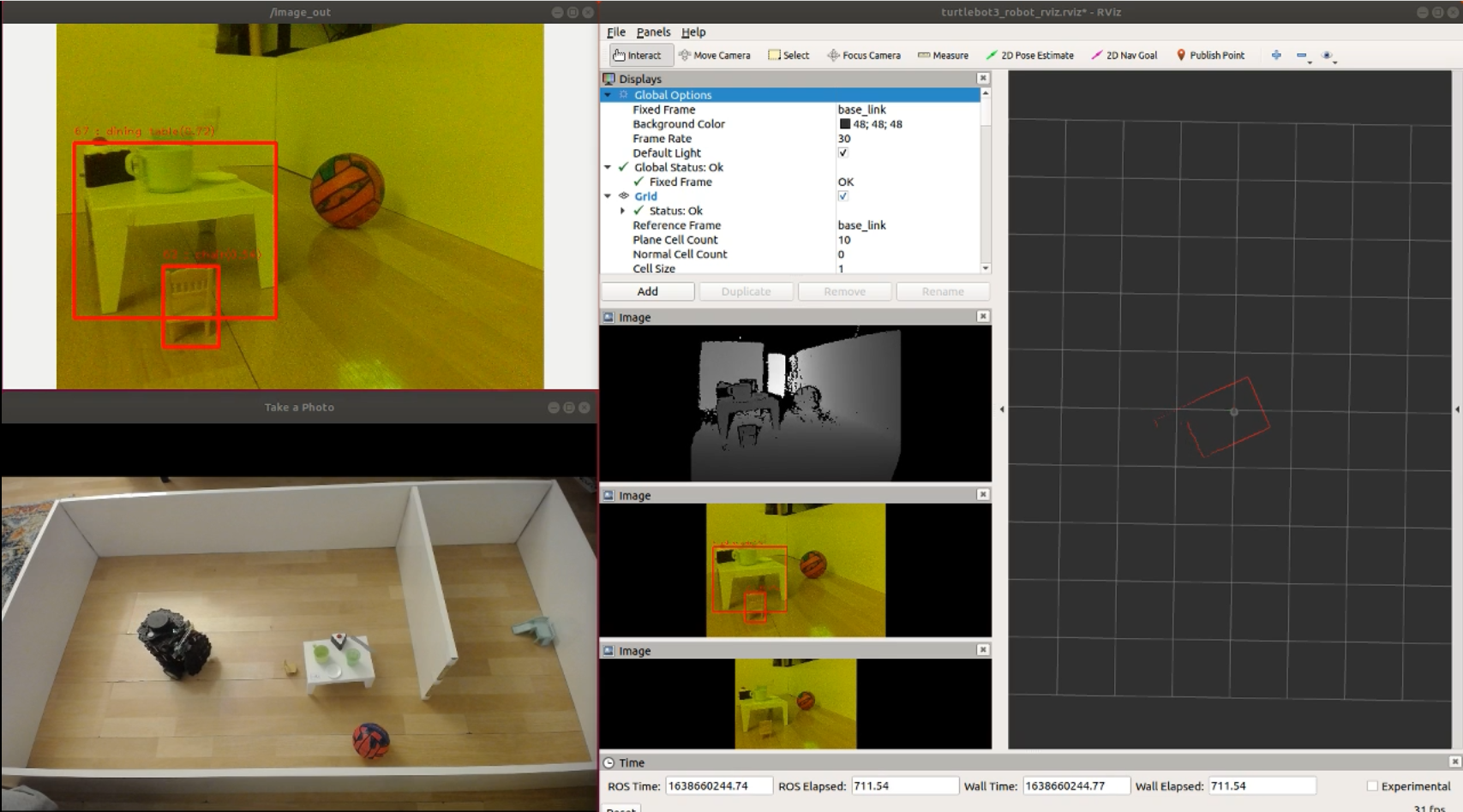
VICA (Vision-Intention-Cognition-Action) architecture developed during my doctoral thesis. This architecture allows an autonomous robot to make decisions by integrating perception, reasoning, and action in a coherent system inspired by human cognition.

Agent visualization module for the JADE platform (Java Agent DEvelopment Framework). JEX allows real-time visualization of agent interactions, facilitating debugging and analysis of multi-agent systems.

Drivers for Saitek flight interfaces compatible with the FlightGear flight simulator. Allows the use of Saitek yokes, throttles, and panels for a realistic simulation experience.

Web application for inventory and equipment management. BocalStore facilitates equipment tracking, reservations, and stock management for laboratories and organizations.
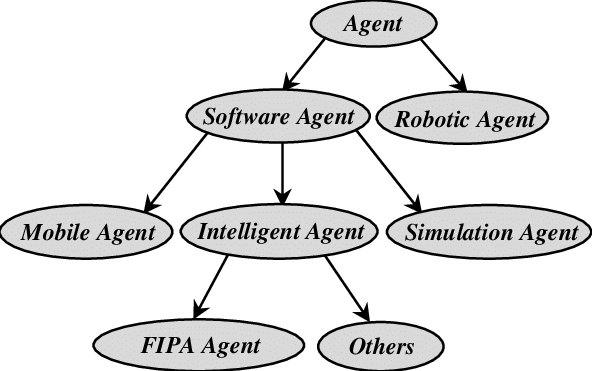
Compiler for the FIPA language (Foundation for Intelligent Physical Agents) using Flex and Bison. This compiler translates FIPA specifications into executable code for multi-agent systems compliant with FIPA standards.
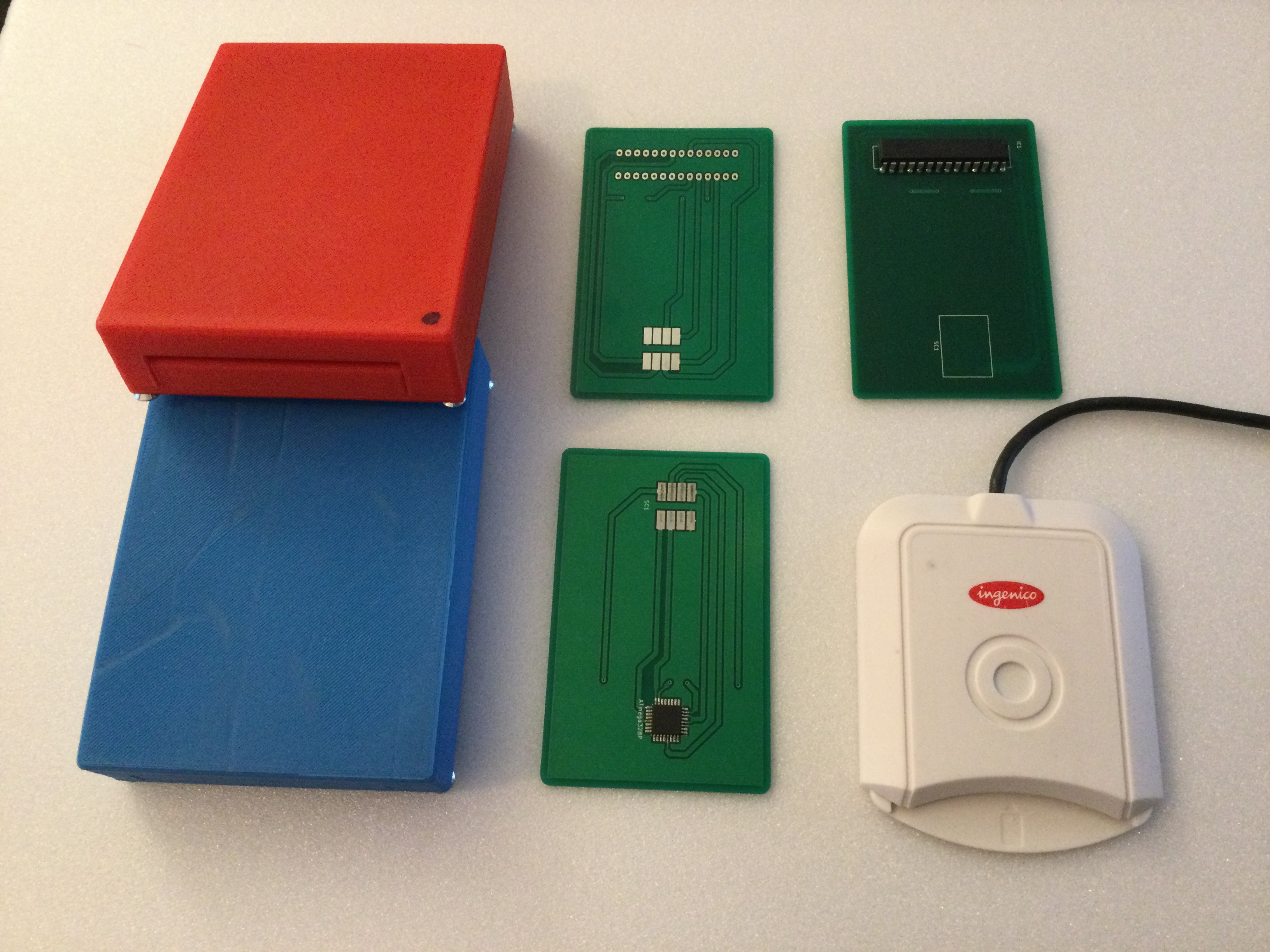
Programming tool for smart cards and Java Card applications. Facilitates the development, deployment, and testing of applets on smart cards for teaching and security projects.
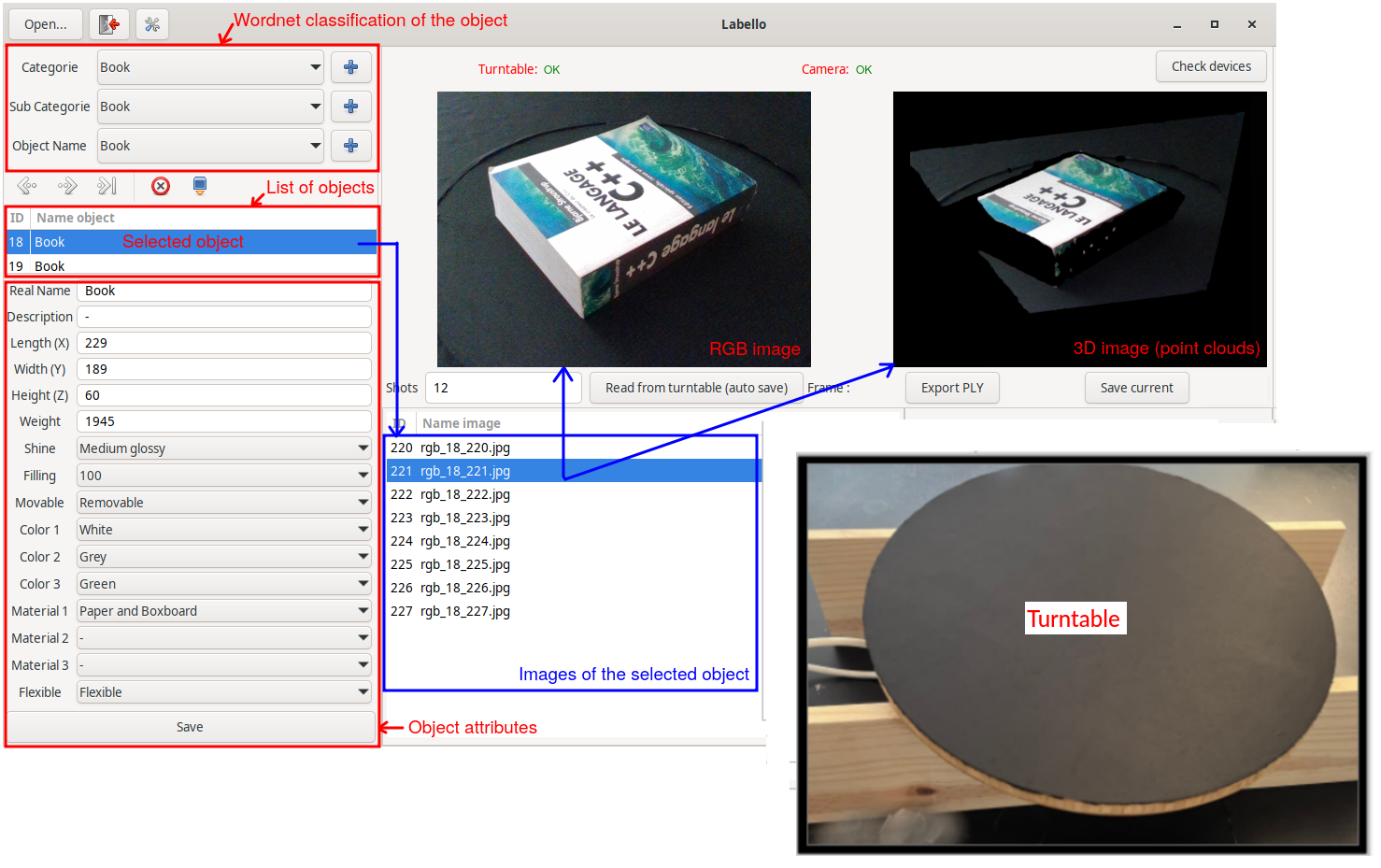
Software for automatically building datasets for machine learning. Labello automates the acquisition, annotation, and preparation of RGBD data for computer vision tasks, particularly object weight prediction.

Home made robot deveped for research and educational purposes. The HDD Robot integrates various sensors and actuators to explore autonomous navigation, object manipulation, and human-robot interaction.