
Halim Djerroud
VICA ARCHIVED
About
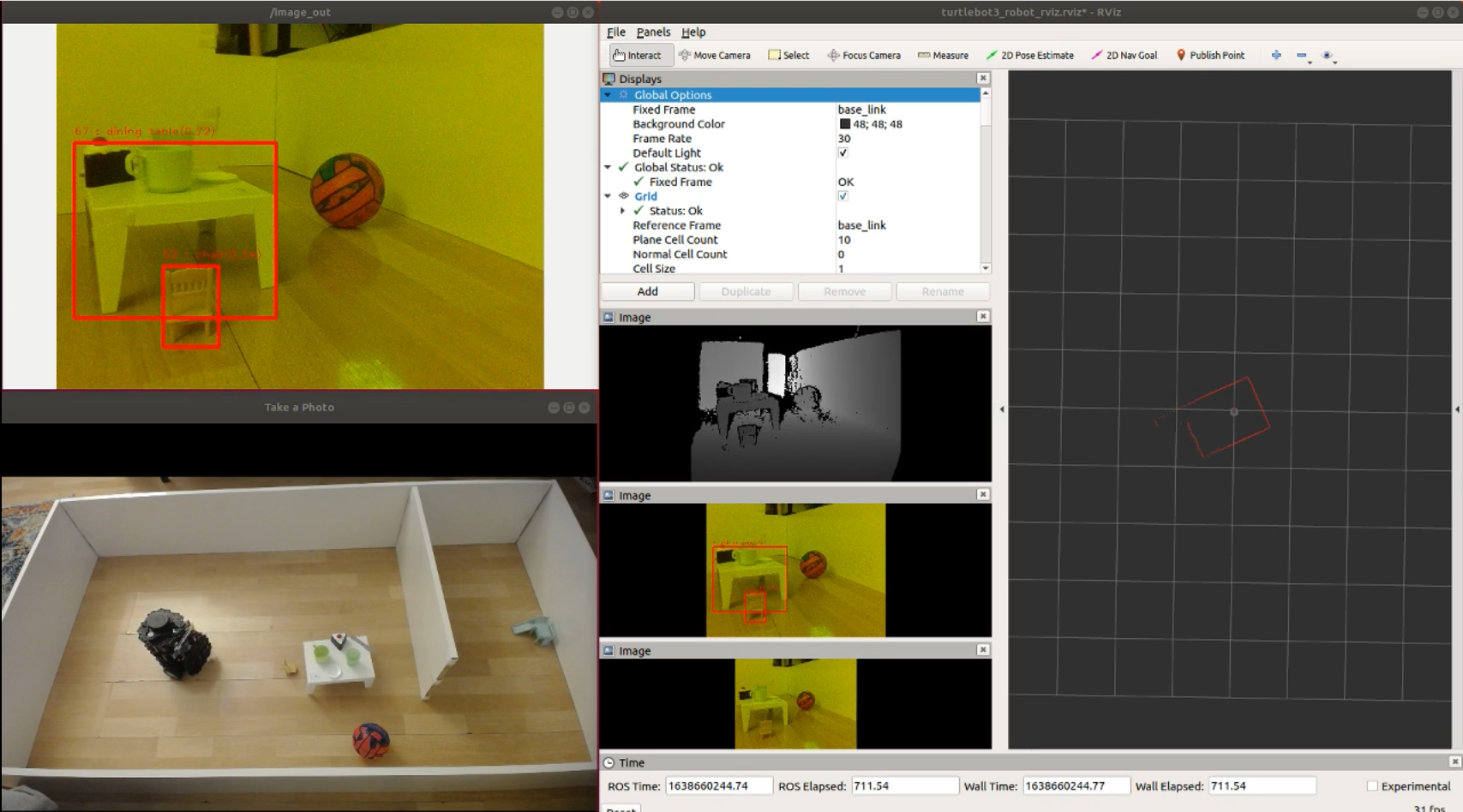
VICA (Vicarious Cognitive Architecture) is the cognitive architecture I developed during my doctoral thesis, defended at Université Paris 8 in December 2021 (labs Paragraphe — Cognition, Langage, Interaction — and LIASD — Artificial Intelligence). The work is motion planning under the NAMO (Navigation Among Movable Obstacles) framework: in a congested home environment of unknown layout, a mobile robot must reach a user-defined position by either avoiding fixed obstacles, displacing those that are movable, or asking those that are interactive (humans, other robots) to give way. VICA wraps this planning problem in a hierarchical architecture whose decisional layer is coupled to a cognitive layer inspired by Alain Berthoz's simplexity — a form of computational parsimony: the system prepares actions and anticipates only what the situation requires, rather than reacting on raw perception. Three artefacts: (i) the VICA architecture itself, structured around a global planner for free-space navigation and a local planner for obstacle handling; (ii) Head Star (H*), a heuristic search whose informative-but-inadmissible heuristic is paired with a two-queue mechanism that preserves completeness despite the inadmissibility; (iii) a multi-agent local planner that anticipates obstacle behaviour by simulation, then compares simulation to executed outcome to learn for future decisions. The stack runs on ROS, on a custom experimental robot built for the thesis. Read against my current programme on epistemic planning, the design signature is already in place: an inadmissible-but-informative heuristic paired with a completeness-preserving two-queue search, a multi-agent framing of decision under uncertainty, and an explicit pursuit of parsimony — the very principles I now apply in the symbolic epistemic setting. Two threads run continuously from there to today: the multi-agent simulator built for the local planner is the ancestor of gAgent; and H*, originally a path-planning heuristic search, will later — in 2026 — be transposed to symbolic epistemic planning to become Epistemic H*, the core algorithm of DEPTH (IPC 2026).