Scientific interest
My research work focuses on the understanding of decision mechanisms implemented by the brain and their applications in robotics. The main objective is to design a cognitive architecture allowing the fusion of multimodal data to generate a generic representation allowing the application of algorithms on this representation for decision making.
Inspired by the work of Alain Berthoz on Simplexity [1], which describes how living organisms prepare action and anticipate reactions. My first contribution in this field was the realisation of a hierarchical robotic architecture called VICA (VIcarious Cognitive Architecture [2]), whose decisional level is coupled to a cognitive architecture.
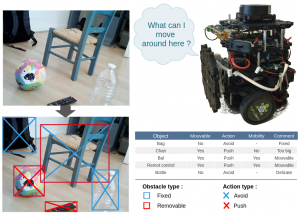
To find a concrete application I turned to mobile robotics which seems to be the ideal candidate to conduct experiments and observe results. The objective is to design a system that allows a robot evolving in a home environment to reach a user-defined position, while avoiding fixed obstacles, moving removable obstacles if they obstruct the passage or asking interactive obstacles (human, robots, etc.) to give way. This problem is known as Navigation Among Movable Obstacles (NAMO).
So far, my work focuses on solving the NAMO problem in an uncertain and partially known dynamic environment. It proposes a robotic architecture allowing a mobile robot to move in a congested home environment with movable obstacles. There are three apparent contributions: 1) Proposal and implementation of a global planner to find a collision-free path in a partially or totally unknown environment (H* algorithm). 2) Proposal and implementation of a local planner based on multi-agent simulation allowing the optimal choice of obstacles to be safely avoided. 3) Proposal and implementation of a robotic/cognitive architecture allowing the perception, the modelling of the environment, the use of the two planners, the first global and the second local, and finally the choice of the action.
So the main idea (inspired by simplexity [1]) is the representation of knowledge in the form of a multi-agent system and the use of simulation to make predictions and thus achieve efficient decision making.
Simulation-based robotic architectures are not numerous, here we experiment with this solution and the results seem conclusive. Thanks to the use of simulation as a decision tool, this kind of architecture offers various perspectives to improve the robot behaviour in NAMO. One of the major perspectives is to add the learning dimension to the simulations, especially in the local planner. This means that the agents representing the obstacles can more accurately simulate the behaviour of real objects as they navigate. We can say that in the end, what we have built is reduced to a physical engine in the form of a multi-agent system, with the advantage that agents can adapt their behaviour, implement a learning system for a more faithful simulation.
I would like to conclude by saying that robotics is not an end in itself, but a tool to better understand human cognition.
[1] Berthoz, Alain. Simplexity. Simplifying Principles for a Complex World, translated by Weiss Giselle. Odile Jacob, 2019
[2] Djerroud, Halim, and Arab Ali Chérif. « VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles. » ICAART (2). 2021.